- 診察日:
- 月・水・金(要電話予約)
- 092-642-5993
- 初 診:
- 午前8時30分-11時
- 再 診:
- 午前8時30分-11時
午前8時15分-17時(自動再来受付機) - 休診日:
- 土・日・祝日、年末年始
※診察券・保険証をお持ちください。
※電話予約がない場合は、待ち時間が長くなることがあります。
- TEL:092-642-5993
- FAX:092-642-5199

手術ナビゲーション ~脳外科・耳鼻科領域~
手術ナビゲーションとは
手術ナビゲーションとは、手術中、どこを触っているのかをリアルタイムで知らせる装置のことです。「ナビゲーション」というと、皆さんの身近なところではカーナビゲーションが思い出されると思います。
カーナビゲーションはGPSという地球規模の位置測定システムをもとに、現在の場所を割り出しています。もう少し詳しく説明すると、車のいる場所を人工衛星で追跡してもらってその座標を取得し、地図上の合致する座標に、現在位置として表示するというシステムです。
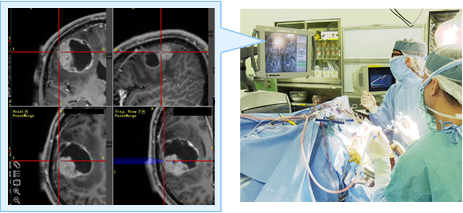
これと同じように、手術ナビゲーションシステムでは、手術室内に設置した赤外線センサーを用いて手術器具の位置測定を行い、コンピューター処理して、患者さんの地図(術前にとったCTやMRI)でどこに当たるかを表示するというシステムです。
現在のナビゲーションシステムシステム
ナビゲーションシステムは、日本国内でも数社から発売されており、全国的にも使用されています。九州大学病院では2006年よりMedtronic社製のナビゲーションシステムを導入して数百例以上の患者さんに使用しており、最近では脳神経外科手術において、重要な深部の神経回路を表示するナビゲーションや、顕微鏡画像の中対象物の輪郭を映し出すなどのハイレベルな応用ナビゲーションを行っています。現在は脳神経外科手術や耳鼻科手術ではナビゲーションの使用がより安全性を高めるということが全世界的にほぼ常識となっています。日本の保険診療においても2008年より「画像等手術支援加算(ナビゲーション)」という診療報酬が設定されており、その使用を推奨するものとなっています。
先端医工学診療部における新たなナビゲーションシステムの研究開発の取り組み
先端医工学診療部は、3D slicerというオープンソフトと赤外線センサーを使った、独自のナビゲーションシステムを開発し、ナビゲーションシステムのさらなる発展のための研究開発を行っています。
①レジストレーションに関わる問題への取り組み
現在のナビゲーションシステムの問題のひとつに、患者さんの実際の位置を登録した情報と、コンピューターで計算された位置がわずかながら(1~5mm程度)ずれてしまう、という問題点があります。これはレジストレーションエラーと呼ばれており、この数値が少ないほど正確なナビゲーションが行えるため、より簡便な方法で、なるべく小さい数値を出せるようなシステム作りを行っております。
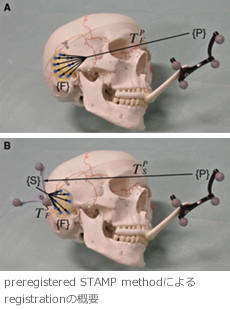
九州大学先端医工学診療部で開発したレジストレーション方法の一つが、「preregistered STAMP method」というものです。通常のレジストレーションは患者さんの皮膚に数か所張り付けた基準マーカーを一つずつポイントして登録し、それを患者さんの画像上の基準マーカーと比較することでレジストレーションを行うのですが、この場合、ポイントを何か所もしないといけないということと、基準マーカーが皮膚のずれに伴ってずれてしまうという欠点がありました。「preregistered STAMP method」では、予め患者さんの頭がい骨の形と合うようなプレート(STAMP)を3Dプリンターで作っておき、術中にそれを頭がい骨にあてがうことで、場所を登録するシステムです(図1)。これにより、術中のレジストレーション作業が非常に素早く、また、正確に終了することがわかりました。
②新たなるナビゲーション技術の開発
現在のナビゲーションシステムは、その画像の位置を知りたい場合には術者が画面を見ないといけないという欠点があります。しかし、顕微鏡での手術を行っているときなど、術者が目を離さずに場所を確認したい場合が多々あります。このような場合のため、九州大学先端医工学診療部では、特定の場所の近くに達すると危険信号として「音」を鳴らすようなナビゲーションシステムを開発して臨床での有用性を検討しています。

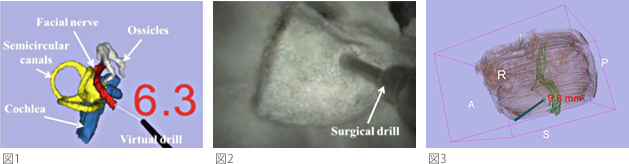
- 図1:Target までの距離を常時測定し、Targetから近いところでは高い音を、Targetから離れたところでは低い音を出して、術者にTargetまでの距離を知らせる。
- 図2:耳鼻科領域での応用(顔面神経へのwarning sound navigation)
- 図3:脳外科領域での応用(錐体路へのwarning sound navigation)
③ARナビゲーションの開発
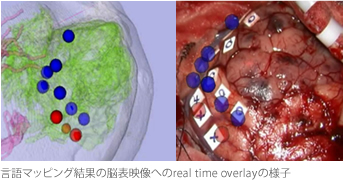
現実環境にコンピューターを用いて情報を付加提示する技術のことを、拡張現実(Augmented Reality: AR)と呼びます。たとえば、カメラで撮影した映像の中に撮影している対象物の名前や、目的地までの方向を矢印で表示することなどがこの技術に当たります。以前より九州大学先端医工学診療部は、腹腔内臓器の腹腔鏡手術の際に、腫瘍や尿管を術野映像に映し出す取り組みをしてきました。現在は、脳腫瘍手術の際に、腫瘍の輪郭を映し出したり、重要な機能を有するところを映し出すなどといったARナビゲーションの有用性を行っています。
![]()
Copyright © CAMIT All Rights Reserved.